What is Remotely Operated Underwater Vehicle (ROV)?
A Remotely Operated Underwater Vehicle (ROV) is an unmanned, tethered underwater robot controlled by operators on a surface vessel or platform. Unlike submarines or human divers, ROVs eliminate the risks of sending people into extreme-depth environments while delivering real-time video, data, and physical intervention capabilities far beyond human reach.
ROVs are central to offshore oil and gas operations, deep-sea scientific research, military mine countermeasures, underwater archaeology, and public safety recovery missions. Understanding how they work, how they are classified, and where they are used is essential for anyone working in maritime, subsea, or ocean engineering fields.
How an ROV Works
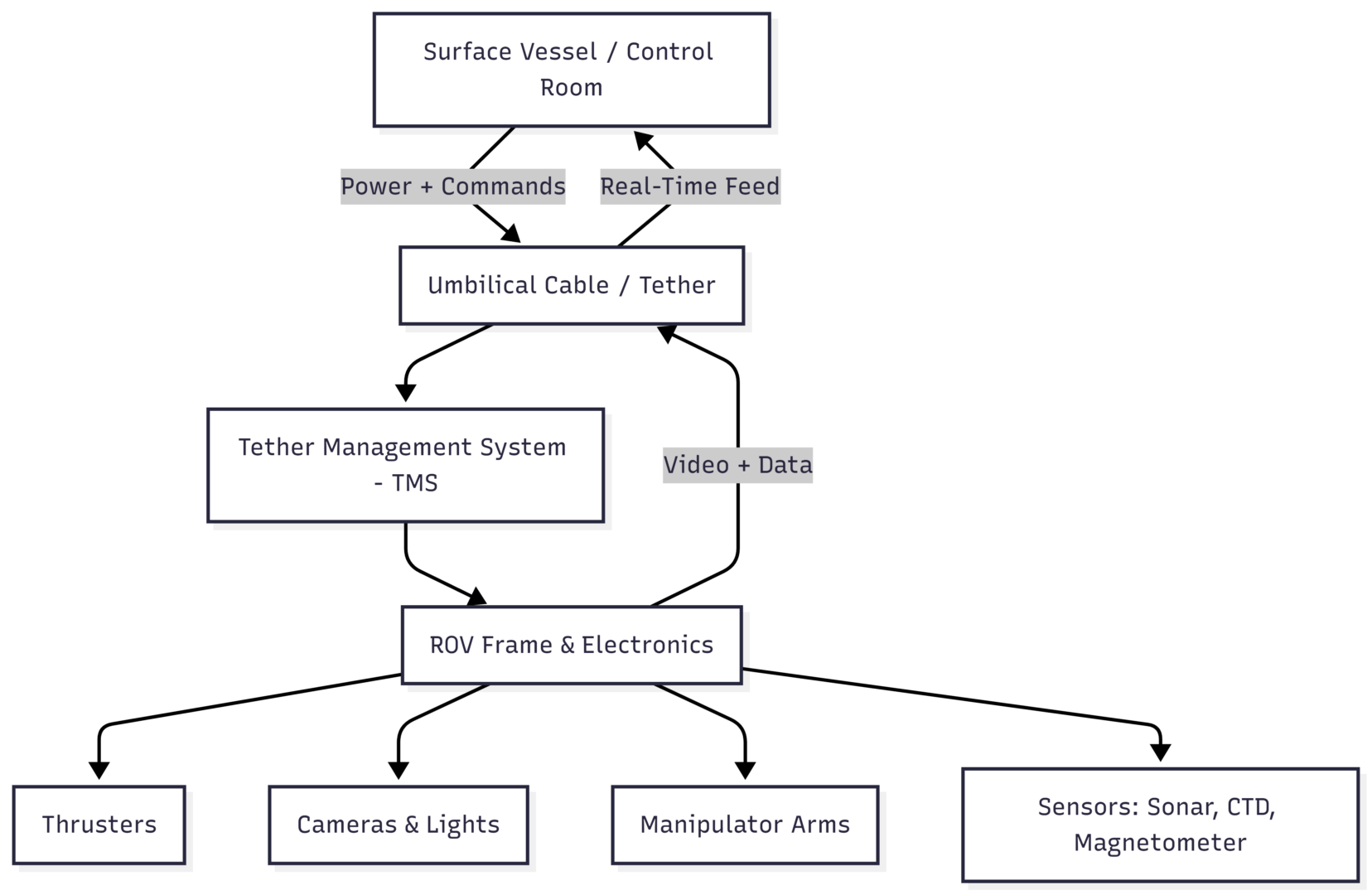
An ROV operates through a neutrally buoyant tether or armored umbilical cable that connects it to a host ship. This cable carries electrical power, video signals, and control data in both directions. A pilot uses a joystick — similar to a game controller — to direct movement, while receiving live video feeds from onboard cameras.
At depth, radio waves are absorbed instantly by water, making wireless communication impractical. The physical tether solves this by providing a stable, high-bandwidth link regardless of depth or water conditions. For very deep operations or rough conditions, a Tether Management System (TMS) is used. The TMS is either a garage-type enclosure that houses the ROV during descent or a separate assembly mounted on the ROV itself. It lengthens and shortens the tether to minimize drag from underwater currents.
Once deployed, the ROV distributes electrical power across its components. In high-power applications, most power drives a motor connected to a hydraulic pump, which in turn powers thrusters, torque tools, and manipulator arms.
ROV Classification by Size and Capability
ROVs are classified based on weight, power, depth capability, and the complexity of tasks they can perform. The table below summarizes the key classes:
| Class | Weight / Power | Max Depth | Primary Use |
|---|---|---|---|
| Micro | < 3 kg | Shallow / Confined | Pipeline interiors, small cavities |
| Mini | ~15 kg | Moderate | Diver alternative, small boat deployable |
| General | < 5 HP | < 1,000 m (some to 7,000 m) | Light survey, sonar-equipped |
| Inspection Class | Varies | Varies | Pipeline survey, hull inspection, data gathering |
| Light Work Class | < 50 HP | < 2,000 m | Light manipulator tasks, polymer chassis |
| Heavy Work Class | < 220 HP | < 3,500 m | Two manipulators, complex subsea tasks |
| Trenching & Burial | 200–500+ HP | Up to 6,000 m | Cable laying, seabed trenching, subsea burial |
Micro and Mini ROVs are often called “eyeball” class because their primary function is observation rather than physical intervention. They are portable enough for a single operator to deploy from a small boat — ideal for confined inspections or as a safer pre-dive assessment tool.
Inspection Class ROVs are rugged commercial systems equipped with live-feed video, still cameras, imaging sonar, Ultra-Short Baseline (USBL) acoustic positioning, Cathodic Protection (CP) probes, and Ultrasonic Thickness (UT) gauges. They can carry light manipulator arms for minor tasks.
Heavy Work Class ROVs are the workhorse of offshore construction. They support lifting payloads exceeding 5,000 kg and can operate multiple manipulators simultaneously. These are the primary vehicles used for deep-water pipeline connections, subsea manifold placement, and structural installation.
Trenching and Burial ROVs are the largest class, used extensively in subsea cable and pipeline protection. Some systems exceed 600 HP and can bury infrastructure at depths of 6,000 meters.
ROV Configurations
ROVs are built in three main physical configurations, each suited to different operating conditions:
Open/Box Frame — The most common design for Work Class and Heavy Work Class ROVs. All components are mounted within an open structural frame. These perform well in light currents (under 4 knots) but are hydrodynamically inefficient for towing.
Torpedo Shaped — Streamlined hull for inspection and data-gathering tasks. Offers low drag, but becomes unstable at low speeds due to tether-induced roll and current effects. Commonly deployed as a towed vehicle (“tow fish”).
Garaged / TMS-Based — ROVs stored in a submersible garage lowered from the ship. The ROV tethers to the garage, not the ship directly. Used for very deep operations where managing a long free-swimming tether becomes impractical.
ROV Construction and Materials
Work-class ROVs are built around an aluminium chassis with a large syntactic foam flotation pack mounted on top. By placing light components high and heavy components low, a significant separation is created between the center of buoyancy and the center of gravity — this provides the positional stability needed to perform precision work underwater.
Thrusters are positioned in balanced vector configurations, typically between the centers of buoyancy and gravity, to maintain attitude control in currents. Electrical components are housed in oil-filled, pressure-compensated compartments or one-atmosphere enclosures to protect against seawater corrosion and crushing pressure.
Anti-corrosion and anti-fouling measures are critical. Special paints inhibit microbe attachment when submerged, and strict drying and storage procedures prevent surface corrosion when the ROV is topside.
Applications of ROVs
Oil and Gas Industry
The offshore energy sector accounts for the largest share of ROV operations globally. ROVs perform internal and external pipeline inspections, structural assessments of platforms and jackets, valve operations, hydraulic interventions, flexible flowline pull-ins, umbilical connections, and component replacements. As offshore development moved into deeper water beyond safe diving limits, ROVs became indispensable.
Scientific Research
Research institutions including the Monterey Bay Aquarium Research Institute (MBARI), Woods Hole Oceanographic Institution (WHOI), and Alfred Wegener Institute deploy ROVs for deep-sea biological surveys, hydrothermal vent exploration, Arctic and Antarctic sea ice measurement, and sediment sampling. Science ROVs are equipped with high-output lighting, broadcast-quality cameras, hydraulic manipulators, and specialized sensors including CTD (conductivity, temperature, depth) sensors, fluorometers, spectrometers, and optodes.
Notable scientific ROVs include:
| ROV Name | Operator | Depth Capability |
|---|---|---|
| Jason | WHOI | Deep ocean, global operations |
| ROV Ventana | MBARI | 1,850 m |
| ROV Doc Ricketts | MBARI | 4,000 m |
| Victor 6000 | IFREMER | 6,000 m |
| ROPOS | Canadian Scientific Submersible Facility | Deep ocean |
| SuBastian | Schmidt Ocean Institute | 4,500 m |
| Deep Discoverer | Global Foundation for Ocean Exploration | 6,000 m |
Military and Defense
Naval forces worldwide use ROVs for mine countermeasures, explosive ordnance disposal (EOD), submarine rescue support, port security, and intelligence, surveillance, and reconnaissance (ISR) missions. The U.S. Navy’s AN/SLQ-48 Mine Neutralization Vehicle operates up to 910 meters from the ship and 610 meters deep, using mission-specific packages for cable cutting, bottom mine neutralization, and moored mine engagement. Navies including the Royal Navy, Norwegian Navy, Royal Netherlands Navy, French Navy, and others have integrated inspection-class ROVs into routine operations.
Underwater Archaeology and Shipwreck Discovery
ROVs have identified and documented many of history’s most significant shipwrecks, including the RMS Titanic, the German battleship Bismarck, USS Yorktown, SM U-111, and SS Central America. In several cases, ROVs have recovered physical artifacts from the seafloor. The URI/IFE’s Hercules ROV is specifically outfitted to survey and excavate both ancient and modern wrecks.
Public Safety and Search & Recovery
Law enforcement agencies, coast guards, and emergency services use ROVs for underwater evidence recovery, victim recovery, disaster response, and flood operations. Some agencies have established dedicated ROV units. ROVs are often deployed as a pre-dive safety check before human divers enter the water, reducing risk in unknown or hazardous underwater environments.
Media and Documentary
As camera technology improved and ROVs became easier to pilot, documentary filmmakers adopted them extensively. ROVs can remain submerged indefinitely without the time constraints of human divers, enabling footage previously impossible to capture. Several major productions have used ROV footage for deep-sea documentary content.
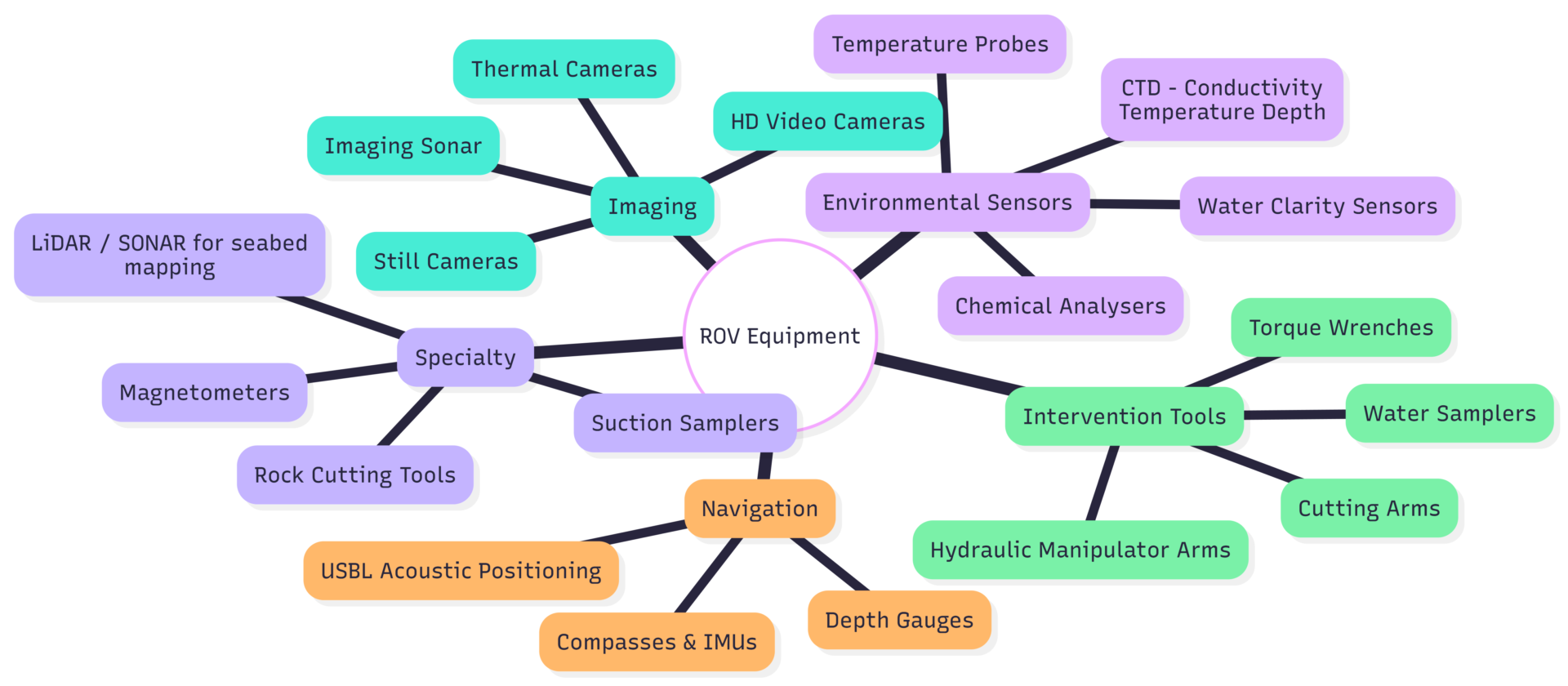
ROV Sensors and Equipment
Beyond the standard camera and lighting package, ROVs can be outfitted with a wide range of tools depending on the mission:
Pricing and Specifications
ROV pricing varies enormously by class and capability:
| ROV Class | Approximate Price Range | Typical Deployment |
|---|---|---|
| Micro / Hobby ROV | $500 – $5,000 | Recreational, basic inspection |
| Mini Inspection ROV | $5,000 – $50,000 | Diver alternative, small commercial jobs |
| Inspection Class | $50,000 – $300,000 | Pipeline/hull surveys, port inspections |
| Light Work Class | $300,000 – $1,000,000 | Offshore light intervention |
| Heavy Work Class | $1,000,000 – $5,000,000+ | Subsea construction, deep oil & gas |
| Science ROVs (e.g., MBARI Tiburon) | $6,000,000+ | Deep-sea research, institutional use |
Operational costs (vessel charter, crew, support equipment) typically exceed the ROV hardware cost for large work-class deployments.
Limitations of ROVs
Despite their capabilities, ROVs have notable constraints:
Tether drag and entanglement — The physical tether restricts range and can become entangled in complex underwater structures such as wrecks or dense infrastructure.
Limited autonomy — Most ROVs require continuous human piloting. Autonomous Underwater Vehicles (AUVs) exist but present significant engineering challenges for real-time intervention tasks.
Wireless control limitations — Radio waves are absorbed rapidly by seawater. Wireless ROV control is currently limited in range and depth. Research into low-power signal networks with subsea amplifiers is ongoing, though these introduce surface clutter and higher costs.
Weather sensitivity at surface — While ROVs are unaffected by conditions once submerged, launch and recovery operations can be disrupted by wave action. Moon pools on dedicated vessels partially mitigate this by providing a protected water column for deployment in poor weather.
Conclusion
Remotely Operated Underwater Vehicles are among the most versatile and critical tools in modern subsea operations. From inspecting offshore pipelines at 3,000 meters to recovering artifacts from famous shipwrecks to supporting naval mine clearance, ROVs extend human capability into environments that would otherwise be inaccessible or fatal. As sensor technology, battery systems, and autonomous control algorithms continue to advance, ROVs will take on an expanding role in ocean exploration, subsea construction, and underwater science.
Happy Boating!
Share What is Remotely Operated Underwater Vehicle (ROV)? with your friends and leave a comment below with your thoughts.
Read How To Reduce Bunker Spend Of Your Ships until we meet in the next article.