what is echo sounder in ship
An echo sounder is one of the most critical navigational instruments aboard any vessel. Without it, navigating shallow coastal waters, river channels, and poorly charted sea routes would rely entirely on guesswork and lead lines. The echo sounder changed marine navigation fundamentally by giving officers a continuous, real-time picture of the water depth beneath the keel — automatically, accurately, and without stopping the ship.
What Is an Echo Sounder?
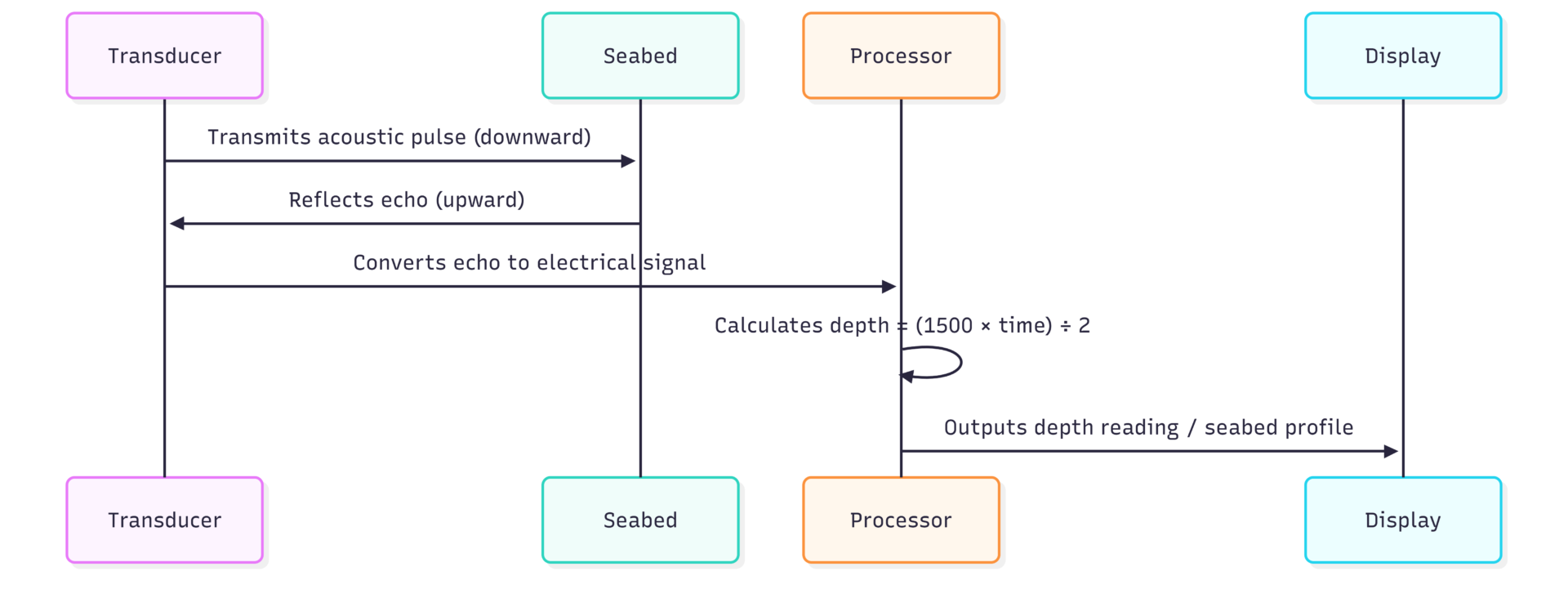
An echo sounder is a SONAR-based instrument that measures the depth of water directly beneath a ship by transmitting acoustic pulses downward from a hull-mounted transducer toward the seabed. When these pulses strike the seafloor or any submerged object, they reflect back as echoes. The instrument measures the time elapsed between transmission and reception of the echo, then calculates the depth using a known speed of sound in water.
The fundamental formula is:
Depth = (Speed of Sound × Time) ÷ 2
The division by 2 accounts for the round trip — down to the seabed and back. The speed of sound in seawater is standardized at 1,500 m/s (though it varies slightly with temperature, salinity, and pressure).
On commercial vessels, echo sounders are often called fathometers, since depth is traditionally recorded in fathoms. On modern ships, readings are displayed in meters.
How Does an Echo Sounder Work?
The working principle is based entirely on the behavior of sound waves in water. The transducer, fitted through the ship’s hull at the keel, emits short acoustic pulses vertically downward at a rate of 5 to 600 pulses per minute. These pulses have a beam width of 12° to 25°.
When the pulses hit the seabed, they reflect upward. The receiving transducer (which is often the same unit as the transmitter) picks up the returning echo, converts it into an electrical signal, and feeds it to the processing unit. The stylus then burns a mark onto paper or displays a reading on a digital screen, tracing a continuous seabed profile as the ship moves forward.
Key Components of a Ship’s Echo Sounder
| Component | Function |
|---|---|
| Transducer | Converts electrical energy to sound pulses and receives returning echoes |
| Pulse Generator (Transmitter) | Produces high-frequency electrical oscillations for the transducer |
| Amplifier | Amplifies weak electrical signals received from the returning echo |
| Recorder / Display Unit | Displays depth data as numerical readout or graphical seabed profile (echograph) |
| Stylus | Burns depth marks onto chart paper in traditional units |
| Thermistor | Compensates for velocity errors caused by water temperature variation |
| Control Panel | Houses range selector, gain control, unit selector, paper speed, and zero adjustment |
Transducer Types
The most common transducer in modern marine use is the electrostrictive (piezoelectric) transducer. It operates on the piezoelectric effect: when an alternating voltage is applied to a quartz crystal sandwiched between two steel plates, the crystal vibrates at high amplitude — particularly when driven at its resonant frequency. The lower steel plate, in direct contact with seawater, transmits these vibrations as sound pulses. The same crystal reverses the process on reception, converting mechanical vibration from the echo back into an electrical signal.
Controls on a Marine Echo Sounder
| Control | Purpose |
|---|---|
| Range Switch | Selects depth range (e.g., 0–50 m, 0–100 m, 100–200 m). Always start at lowest range. |
| Unit Selector | Choose between meters, feet, or fathoms |
| Gain Control | Adjusts sensitivity to produce clearest echo trace |
| Paper Speed Control | Sets chart paper speed (typically two speeds available) |
| Zero / Draught Adjustment | Feeds ship’s draught so display shows total sea depth rather than depth below keel |
| Fix / Event Marker | Draws a line on paper to mark a navigational event or fix |
| Transducer Changeover | Switches between forward and aft transducers if vessel has both |
| Dimmer | Adjusts display illumination |
Two Operating Techniques: Ranging vs. Phasing
Echo sounders use one of two fundamental techniques for depth measurement:
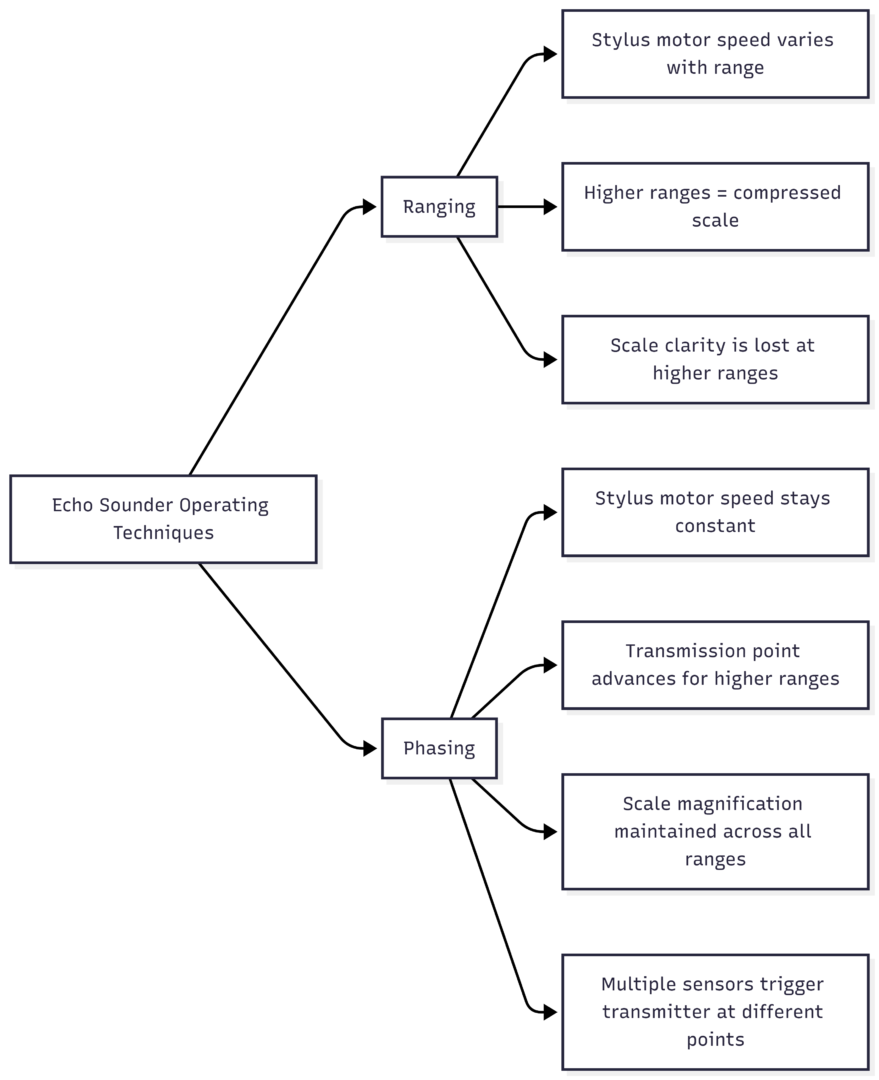
Ranging uses a fixed relationship between stylus speed and range. To extend the range, the stylus motor slows down. This works but causes the scale to become increasingly compressed at higher ranges, making readings harder to interpret precisely.
Phasing keeps the stylus motor at constant speed. Instead, the transmission point is advanced electronically for each range step. A magnet on the stylus belt activates different sensors around the belt circumference, each triggering transmission earlier and introducing a corresponding delay before the stylus reaches the corresponding depth mark on the paper. For example, switching from the 0–50 m range to the 50–100 m range means the system transmits early and introduces a 0.067-second delay (calculated as 50 × 2 ÷ 1,500), ensuring the stylus aligns correctly with the 50 m mark on display.
Important caution with phasing: Always begin at the lowest range and confirm an echo before switching to higher ranges.
Types of Echo Sounders Used on Ships
| Type | Beam Pattern | Primary Application | Typical Use |
|---|---|---|---|
| Single-Beam | Single narrow cone | Basic depth monitoring | Commercial vessels, small craft |
| Multi-Beam | Fan-shaped swath | Detailed seabed mapping | Survey ships, hydrographic vessels |
| Side-Scan Sonar | Lateral imaging | Seabed profiling, wreck detection | Salvage, exploration, survey |
| Dual-Frequency | Two simultaneous beams | Shallow + deep water coverage | FPSOs, offshore vessels |
Single-beam echo sounders are standard on most commercial and cargo vessels. Multi-beam systems are fitted on survey ships and some advanced vessels where high-resolution seabed charts are required. Dual-frequency systems allow operators to switch between high frequency (precise, shallow water) and low frequency (deeper penetration, greater range) depending on the operating environment.
Applications of Echo Sounders on Ships
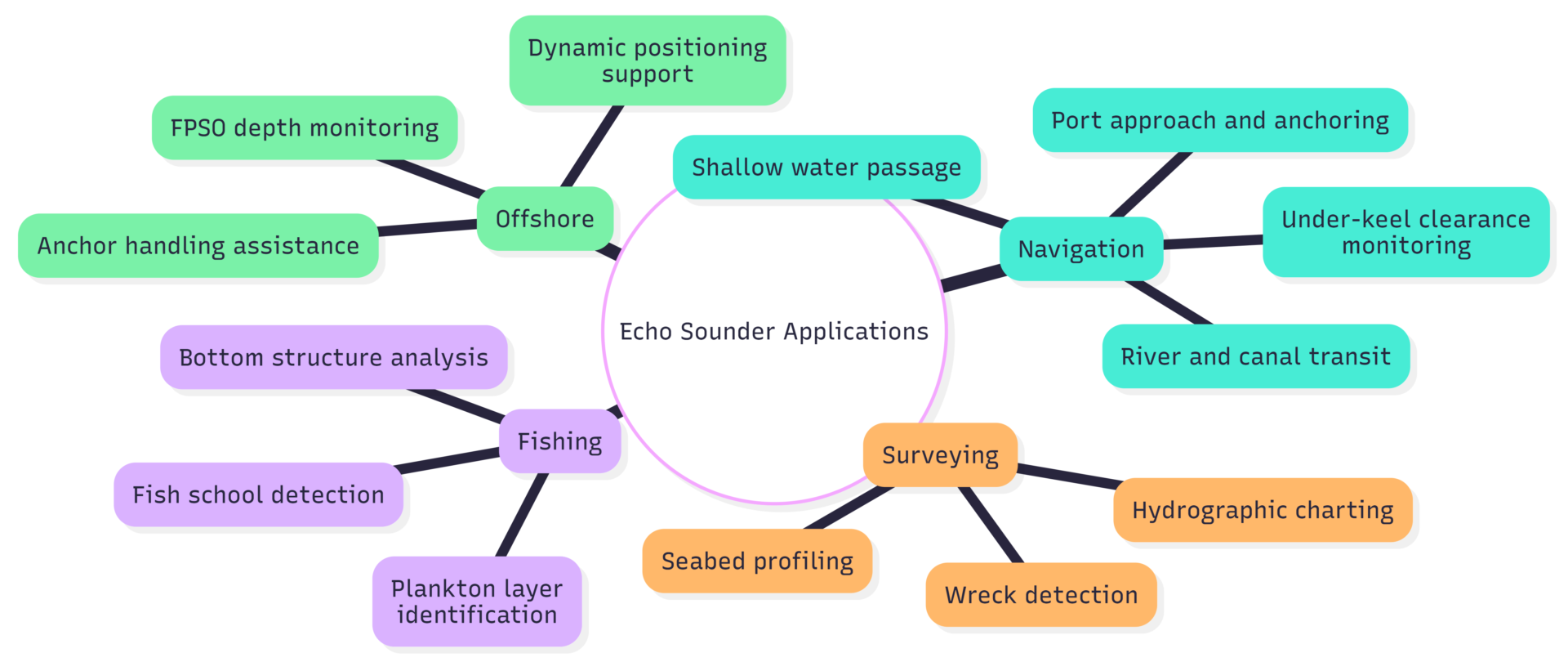
The primary application on any vessel remains under-keel clearance (UKC) monitoring — continuously verifying that there is sufficient water depth beneath the ship’s keel to avoid grounding. This is especially critical during port approaches, shallow coastal transits, and river passages.
Echo Sounder Errors and How to Manage Them
No instrument is perfect. Echo sounder readings are subject to several well-documented errors that every officer should understand.
| Error Type | Cause | Effect | Correction |
|---|---|---|---|
| Velocity Error | Temperature, salinity, pressure variations | Indicated depth differs from actual | Use thermistor compensation; consult NP 139 |
| Stylus Speed Error | Voltage fluctuations to stylus motor | Incorrect depth marking | Regular calibration checks |
| Pythagoras Error | Two transducers >2 m apart (separate TX/RX) | Geometrical depth error | Consult correction tables in ship’s manual |
| Multiple Echoes | Sound bouncing between seabed and hull | False secondary depth marks on paper | Identify true echo; reduce gain |
| Thermal/Density Layer Error | Sound reflecting off density interfaces | Echo from layer, not seabed | Verify with alternative range |
| Zero Line Adjustment Error | Incorrect zero/draught setting | Constant offset in all readings | Verify and reset zero adjustment |
| Cross Noise | High amplifier sensitivity | Masking of shallow water depths | Adjust swept gain control |
| Aeration | Air bubbles under hull | Scattered false returns | Use forward transducer; reduce speed |
Aeration is particularly common in heavy weather, during hard rudder maneuvers, pitching in light condition, and when using astern propulsion. Switching to a forward-mounted transducer (if fitted) and reducing ship’s speed are the primary corrective actions.
The standard velocity of sound used for depth calculation is 1,500 m/s, calibrated at 16°C and 3.4% salinity. In fresh water, the recorded depth can read approximately 3% higher than actual depth due to the lower sound velocity.
Echo Sounder Specifications: Typical Technical Data
| Parameter | Typical Value |
|---|---|
| Frequency (single beam) | 15 kHz – 200 kHz |
| Frequency (deep sea) | 12 kHz – 30 kHz |
| Frequency (shallow water) | 100 kHz – 200 kHz |
| Pulse rate | 5 – 600 pulses/min |
| Beam width | 12° – 25° |
| Depth range | 0.5 m – 12,000 m (model dependent) |
| Speed of sound assumed | 1,500 m/s |
| Display type | Digital / Echograph paper / LCD |
| Power supply | 24V DC or 110/220V AC |
| Operating temperature | -15°C to +55°C |
| IMO compliance | SOLAS Chapter V / IEC 62288 |
Echo Sounders on FPSOs and Offshore Vessels
Floating Production Storage and Offloading (FPSO) vessels present unique challenges for echo sounder installation. FPSOs remain stationary for extended periods, experience significant pitch and roll, and operate in both shallow coastal and deep offshore environments.
For FPSOs, dual-frequency or multi-beam echo sounders are preferred. The transducer placement must avoid areas of high turbulence and hull interference, often requiring specialized mounting brackets or retractable arms to protect the transducer during maintenance or to prevent marine growth fouling. Integration with dynamic positioning (DP) systems and anchor-handling control systems is also standard, allowing real-time depth data to feed directly into the vessel’s positioning and stability management.
White Line Function and Fish Detection
Modern echo sounders include a white line feature that electronically suppresses the leading edge of the seabed echo, creating a thin white line between the seabed echo and any fish or objects resting on the bottom. This allows operators to clearly distinguish between the true seabed return and biological targets directly above it — critical for fishing vessels and for operators trying to identify objects resting on the seafloor.
Shallow water alarm systems are also standard on commercial vessels, triggering an audible and visual alert when depth drops below a preset threshold — providing the bridge team with early warning before UKC becomes critical.
Conclusion
The echo sounder is an indispensable navigational instrument on every class of ship, from small coastal vessels to large crude oil tankers and offshore FPSOs. Its ability to deliver continuous, real-time water depth data beneath the keel — with no moving parts, no external references required, and automatic seabed profiling — makes it unique among navigational aids. Understanding its operating principles, control functions, error sources, and maintenance requirements is fundamental knowledge for any officer keeping a navigational watch or working in marine engineering.
FAQ
Are echo sounders mandatory on ships? Yes. SOLAS Chapter V requires echo sounders on vessels above certain sizes operating in international waters.
What frequency does a ship echo sounder use? Deep-sea sounders typically use 12–30 kHz. Shallow water and fishfinder units use 100–200 kHz.
What is the speed of sound used in echo sounder calculations? 1,500 m/s is the standard assumed value, calibrated for average seawater conditions.
What is the difference between an echo sounder and a fish finder? A fish finder uses the same acoustic principle but is optimized for detecting biological targets and underwater structure rather than solely measuring depth.
What causes aeration in echo sounders? Air bubbles entrapped under the hull from heavy weather, sharp turns, pitching, or astern propulsion scatter the sound pulses and corrupt the echo return.
Happy Boating!
Share what is echo sounder in ship with your friends and leave a comment below with your thoughts.
Read What is marine eductor in ships until we meet in the next article.